设计目标
设计一个仅使用一个乘法器单元的参数化串行FIR,要求:
- FIR参数可配置
- 具有双向P2P握手协议,可嵌入P2P流水线中
- 当流水线后续被阻塞时,要求完成当前运算再进入等待状态
结构框图
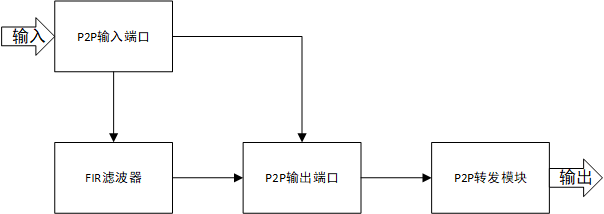
整体结构如上图所示,共分为4个模块:
- P2P输入模块:输入模块,接收P2P握手信号,将数据传递给FIR滤波器并控制整个系统运行,为控制流起点
- FIR滤波器:功能模块,完成FIR滤波运算
- P2P输出端口:将功能模块的输出通过P2P握手方式发送给P2P转发模块
- P2P转发模块:隔离FIR滤波器和后向模块,使当后向模块阻塞时FIR滤波器仍能完成当前运算且不丢失数据
参数说明
| 参数 | 默认值 | 功能 |
|---|---|---|
| ADDR_WIDTH | 3 | 配置地址位宽,要求为最小为ceil(log2(COM_NUM)) |
| DATA_WIDTH | 8 | 输入数据位宽 |
| COM_NUM | 6 | FIR级数 |
端口列表
系统端口
| 名称 | 类型 | 位宽 | 功能 |
|---|---|---|---|
| clk | input | 1 | 系统时钟 |
| rst_n | input | 1 | 系统复位信号 |
配置端口
| 名称 | 类型 | 位宽 | 功能 |
|---|---|---|---|
| cfg_addr | input | ADDR_WIDTH | 配置数据的地址 |
| cfg_data | input | DATA_WIDTH | 配置数据 |
| cfg_valid | input | 1 | 配置有效信号,高有效 |
输入端口
| 名称 | 类型 | 位宽 | 功能 |
|---|---|---|---|
| din_data | input | DATA_WIDTH | 输入数据 |
| din_valid | input | 1 | 输入有效信号 |
| din_busy | output | 1 | 输入忙信号 |
输出端口
| 名称 | 类型 | 位宽 | 功能 |
|---|---|---|---|
| dout_data | output | DATA_WIDTH | 输出数据 |
| dout_valid | output | 1 | 输出有效信号 |
| dout_busy | input | 1 | 输出忙信号 |
设计实现
配置接口
配置接口使用寄存器组实现,掉电丢失,因此每次使用之前需要进行配置FIR参数,配置接口时序如下所示:
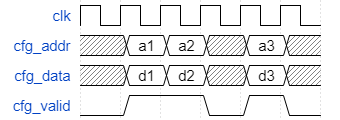
配置地址,配置数据和配置有效信号同时有效即完成了一个位置的数据写入,要求配置地址的最大值小于COM_NUM,以防止配置数据超出限制地址。该部分的代码实现如下所示:
1 | integer i; |
在复位信号有效时,所有位置的数据被清零,因此每次复位后需要重新写入配置数据。当配置有效信号有效且写入数据地址处于有效区间时,配置数据被写入对应位置。
P2P输入接口
P2P输入接口是控制流和数据流的起点,主要信号为din_valid,din_busy和din_data信号,其中din_busy是唯一的输出信号,该信号有效表示后续处于处理状态,无法接收新的数据,因此该信号使用一个状态机实现:
- INIT状态:等待状态,复位后处于该状态,当din_valid信号有效时,转移到WORK状态。
- WORK状态:工作状态,表示后续处于工作状态,当当前运算结果已经成功传递给后续模块时,转移到INIT状态,该状态下din_busy信号为高,否则din_busy信号为低。
相关代码如下:
1 | always @ (posedge clk or negedge rst_n) begin |
由于din_busy信号的行为与状态高度契合,因此直接使用din_busy作为状态变量,该信号为0时,表示该接口准备就绪,可以接受数据输入,当有信号输入(din_valid==1)时,跳转到1;当该信号为1时,表示后续正在处理或被阻塞,当输出数据已经被传输给后端((!inter_fir_busy) && inter_fir_valid,其中inter_fir_valid和inter_fir_busy分别是FIR和转发模块之间的有效和忙信号)时,可以接收下一个输入,跳转到0。
FIR滤波器
该部分使用一个乘法器构成串行FIR滤波器,结构图如下:
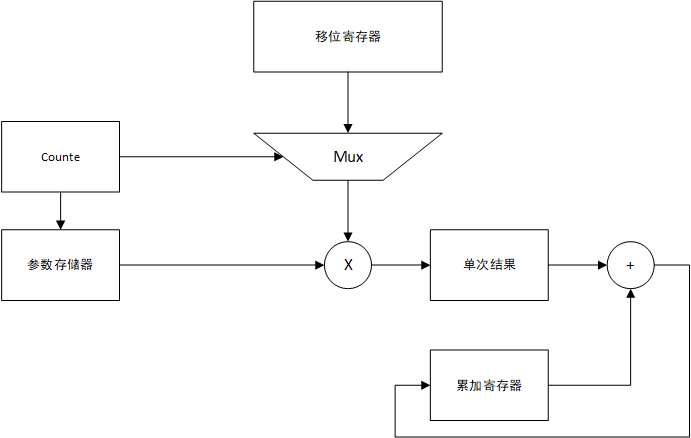
计数器
自增计数器在FIR中充当控制器使用,其产生的结果用于选择参数,选择输入和决定累加寄存器的工作模式,代码如下:
1 | always @ (posedge clk or negedge rst_n) begin |
该部分为一个0~COM_NUM的计数器,当din_busy==1时自增(工作状态自增)。其中0~COM_NUM-1为运算流程,count\==COM_NUM标记为运算部分终止,当达到该条件时,count将卡死并不再递增,直到该次运算结束清零(din_busy\==0)时。
移位寄存器
移位寄存器用于存储数据,共COM_NUM级,要求从P2P接口输入一个数据时整体后移一位,同时抛弃最后一个数据,代码如下:
1 | reg [DATA_WIDTH-1:0]fir_data[COM_NUM-1:0]; |
复位时,所有寄存器清零,当P2P输入接口有数据输入(din_valid && (!din_busy))时,将数据整体后移一位并将输入数据放在最前一个寄存器中。注意寄存器的移位操作与din_busy置1同时完成,因此当din_busy==1时,移位寄存器数据稳定。
乘法器
乘法器根据count选择移位寄存器和参数,并完成单个乘法运算,代码如下所示:
1 | reg [2*DATA_WIDTH-1:0]one_cycle_result; |
当运算进行时,根据count选择数据相乘,当是数据超出限制,即已经完成后,持续输出0防止后级的累加器累加错误的数据,注意(2*DATA_WIDTH)'(fir_data[COM_NUM - count - 1])为了显式表示输出数据的位数。同时该部分还缓存了运算结束信号finish_count,缓存后的信号finish_count_buf与乘法器结果one_cycle_result同步,即让控制流数据和数据流通过相同的延迟路径,以达到同步和简化功能。
累加器
累加器用于累加乘法器的输出,要求运算过程中来累加,输出过程稳定,非计算过程清零以实现下一次运算,代码如下:
1 | reg [2*DATA_WIDTH-1:0]inter_fir_dout; |
除了工作状态以外(din_busy==1),其他状态该累加器均清0。工作状态下,当运算完成向下一级输出时(下一级为转发模块),数据保持稳定,否则累加乘法器的输入。
P2P输出接口
P2P输出接口用于FIR滤波器向转发模块发送数据,需要控制的为有效信号valid(data信号即为累加器输出),该部分代码如下:
1 | always @(posedge clk or negedge rst_n) begin |
当结束信号有效(finish_count_buf\==1)时,valid信号拉高,注意该信号相比finish_count_buf落后一个周期,与累加器输出同步(落后乘法器输出一个时钟周期),当传输完成时(inter_fir_busy\==0 且finish_count_buf !=0 )时清零。
转发模块
该转发模块用于隔离FIR滤波器和后级输出:
- 若没有该模块,当后级忙时,FIR将被卡在当前运算处无法接受下一个输入,知道后级可接受信号
- 若添加该模块,当后级忙时,FIR仍然可以完成当前运算并开始下一次计算,因此留给后一级的相应时间延长。
该部分为一个简单的P2P直连接口,没有内部组合逻辑,其对FIR的接口部分需要控制busy信号,代码如下所示:
1 | always @ (posedge clk or negedge rst_n) begin |
该部分与P2P输入接口完全相同,具体说明可以参见【P2P输入接口】,其对下一级的输出部分代码如下所示:
1 | always @ (posedge clk or negedge rst_n) begin |
dout_data为输出数据,当与FIR传输信号握手成功(inter_fir_valid && !inter_fir_busy)时更新,否则一直保持。dout_valid为对下一级的输出valid信号,当有新数据传入时置1,当传输成功时置0,表示当前传输结束。
