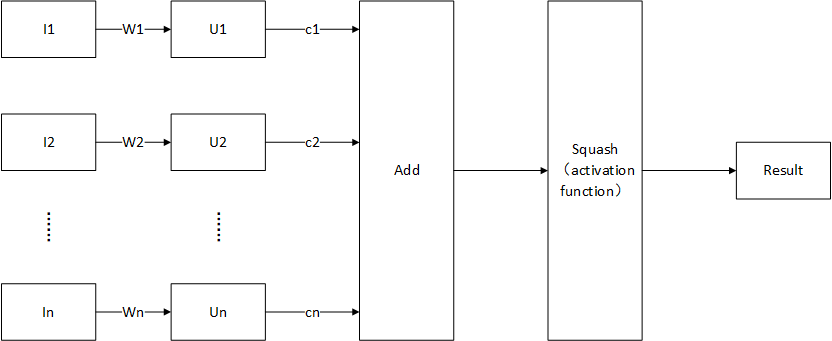
理论学习 胶囊结构 胶囊可以看成一种向量化的神经元。对于单个神经元而言,目前的深度网络中流动的数据均为标量。例如多层感知机的某一个神经元,其输入为若干个标量,输出为一个标量(不考虑批处理);而对于胶囊而言,每个神经元输入为若干个向量,输出为一个向量(不考虑批处理)。前向传播如下所示:
其中$I_i$为第i个输入(向量),$W_i$为第i个权值(矩阵),$U_i$为中间变量(向量),由输入和权值叉乘获得。$c_i$为路由权值(标量),需要注意的是该标量是前向传播过程中决定(使用动态路由算法)的,不是通过反向传播优化的参数。Squash为一种激活函数。前向传播使用公式表示如下所示:
由以上可以看出,胶囊结构中流动的数据类型为向量,其激活函数Squash输入一个向量,输出一个向量。
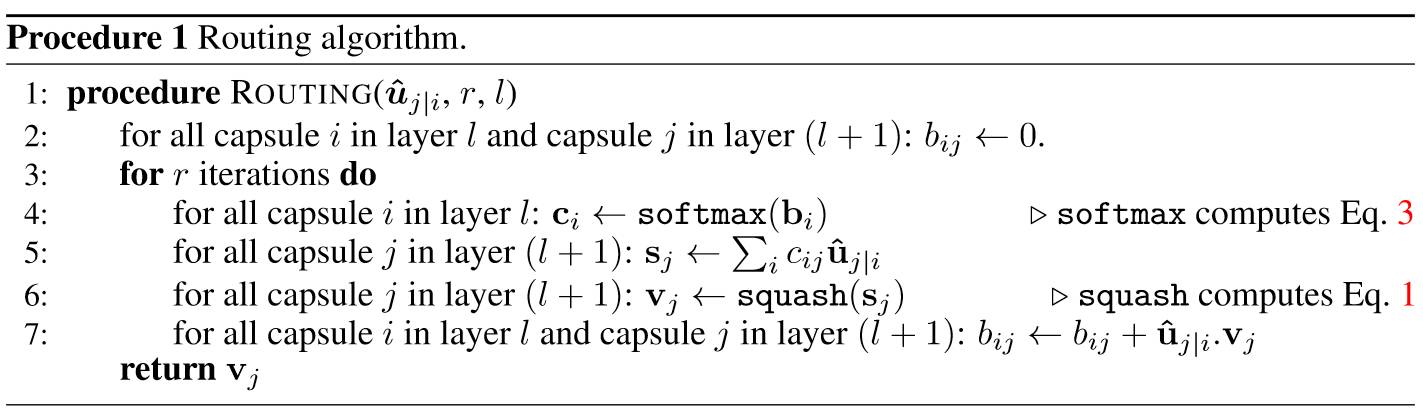
动态路由算法 动态路由算法适用于确定胶囊结构中$c_i$的算法,其算法伪代码如下所示:
首先其输入为$U_{j|i}$为本层的中间变量,其中i为这一层胶囊数量,j为下一层胶囊数量,最终获得的胶囊的输出$v_j$,其步骤描述如下:
初始化:初始化一个临时变量b,为一个$i \times j$的全为0的矩阵
获取这一步的连接权值c:$c_i = softmax(b_i)$,将临时变量b通过softmax,保证$c_i$的各分量和为1
获取这一步的加权和结果S:$sj = \sum_i c {ij}u_{j|i}$,按这一步连接权值计算加权和
非线性激活:$v_j = squash(s_j)$,经过非线性激活函数,获取这一步的胶囊输出
迭代临时变量:$b{ij} = b {ij} + u{i|j} \cdot v {j}$,所这一步的输出与中间变量方向相近,增加临时变量b,即增加权值;若这一步输出与中间变量方向相反,减小临时变量b,即减小权值。
若已经迭代到指定次数,输出$v_j$,否侧跳到步骤2
同时,对于迭代次数j,论文中表示过多的迭代会导致过拟合,实践中建议使用3次迭代。
输出与代价函数 输出层胶囊的输出为向量,该向量的长度即为概率。也就是说,前向传播的结果为输出最长向量的输出胶囊所代表的结果。反向传播时,也需要考虑网络的输出为向量而不是标量,因此原论文中了如下的代价函数(每个输出的代价函数,代价函数为所有输出代价函数的和$L = \sum\limits_{c=0}^n L_c$)
其中,$T_c$为标量,当分类结果为c时$T_c = 1$,否则$T_c = 0$;$\lambda$为固定值(一般为0.5),用于保证数值稳定性;$m^+$和$m^-$也为固定值:
对于$T_c = 1$的输出胶囊,当输出向量大于$m^+$时,代价函数为0,否则不为0
对于$T_c = 0$的输出胶囊,当输出向量小于$m^-$时,代价函数为0,否则不为0
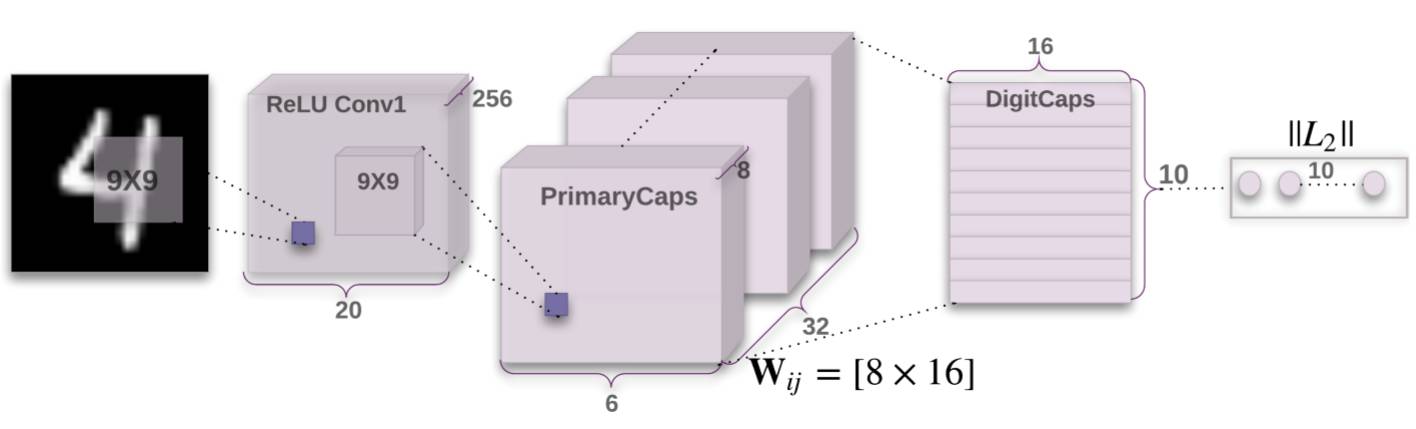
整体架构 原论文中使举了一个识别MNIST手写数字数据集的例子,网络架构如下图所示:
第一层为普通的卷积层,使用9*9卷积,输出通道数为256,输出数据尺寸为20*20*256
第二层为卷积层,该卷积层由平行的32个卷积层组成,每个卷积层对应向量数据中的一个向量。每个卷积层均为9*9*256*8(输入channel为256,输出channel为8)。因此输出为6*6*32*8,即窗口大小为6*6,输出channel为32,每个数据为8个分量的向量。
第三层为胶囊层,行为类似于全连接层。输入为6*6*32=1152个8分量输入向量,输出为10个16分量的向量,对应的有1152*10个权值,每个权值为8*16的矩阵,最终输出为10个16分量的向量
最终输出10个16分量的向量,最终的分类结果是向量长度最大的输出。
代码阅读(PyTorch)
本次代码阅读并不关心具体的实现方式,主要阅读CapsNet的实现思路
前胶囊层(卷积层) 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 class PrimaryCaps (nn.Module ): def __init__ (self, num_capsules=8 , in_channels=256 , out_channels=32 , kernel_size=9 ): super (PrimaryCaps, self).__init__() self.capsules = nn.ModuleList([ nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size, stride=2 , padding=0 ) for _ in range (num_capsules)]) def forward (self, x ): u = [capsule(x) for capsule in self.capsules] u = torch.stack(u, dim=1 ) u = u.view(x.size(0 ), 32 * 6 * 6 , -1 ) return self.squash(u) def squash (self, input_tensor ): squared_norm = (input_tensor ** 2 ).sum (-1 , keepdim=True ) output_tensor = squared_norm * input_tensor / ((1. + squared_norm) * torch.sqrt(squared_norm)) return output_tensor
重点关注forward前向传播部分:
1 2 3 4 5 def forward (self, x ): u = [capsule(x) for capsule in self.capsules] u = torch.stack(u, dim=1 ) u = u.view(x.size(0 ), 32 * 6 * 6 , -1 ) return self.squash(u)
self.capsules为num_capsules个[in_channels,out_channels,kernel_size,kernel_size]的卷积层,对应上文所述的第二层卷积层的操作。注意该部分的输出直接被变为[batch size,1152,8]的形式,且通过squash激活函数挤压输出向量
胶囊层 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 class DigitCaps (nn.Module ): def __init__ (self, num_capsules=10 , num_routes=32 * 6 * 6 , in_channels=8 , out_channels=16 ): super (DigitCaps, self).__init__() self.in_channels = in_channels self.num_routes = num_routes self.num_capsules = num_capsules self.W = nn.Parameter(torch.randn(1 , num_routes, num_capsules, out_channels, in_channels)) def forward (self, x ): batch_size = x.size(0 ) x = torch.stack([x] * self.num_capsules, dim=2 ).unsqueeze(4 ) W = torch.cat([self.W] * batch_size, dim=0 ) u_hat = torch.matmul(W, x) b_ij = Variable(torch.zeros(1 , self.num_routes, self.num_capsules, 1 )) if USE_CUDA: b_ij = b_ij.cuda() num_iterations = 3 for iteration in range (num_iterations): c_ij = F.softmax(b_ij) c_ij = torch.cat([c_ij] * batch_size, dim=0 ).unsqueeze(4 ) s_j = (c_ij * u_hat).sum (dim=1 , keepdim=True ) v_j = self.squash(s_j) if iteration < num_iterations - 1 : a_ij = torch.matmul(u_hat.transpose(3 , 4 ), torch.cat([v_j] * self.num_routes, dim=1 )) b_ij = b_ij + a_ij.squeeze(4 ).mean(dim=0 , keepdim=True ) return v_j.squeeze(1 ) def squash (self, input_tensor ): squared_norm = (input_tensor ** 2 ).sum (-1 , keepdim=True ) output_tensor = squared_norm * input_tensor / ((1. + squared_norm) * torch.sqrt(squared_norm)) return output_tensor
获得中间向量 1 2 3 4 5 batch_size = x.size(0 ) x = torch.stack([x] * self.num_capsules, dim=2 ).unsqueeze(4 ) W = torch.cat([self.W] * batch_size, dim=0 ) u_hat = torch.matmul(W, x)
这一部分计算中间向量$U_i$
动态路由 1 2 3 4 5 6 7 8 9 10 for iteration in range (num_iterations): c_ij = F.softmax(b_ij) c_ij = torch.cat([c_ij] * batch_size, dim=0 ).unsqueeze(4 ) s_j = (c_ij * u_hat).sum (dim=1 , keepdim=True ) v_j = self.squash(s_j) if iteration < num_iterations - 1 : a_ij = torch.matmul(u_hat.transpose(3 , 4 ), torch.cat([v_j] * self.num_routes, dim=1 )) b_ij = b_ij + a_ij.squeeze(4 ).mean(dim=0 , keepdim=True )
动态路由的结构中:
第1行计算了softmax函数的结果,对用临时变量b
第5行计算加权和
第6行计算当前迭代次数的输出
第9和10行更新临时向量的值
代价函数 1 2 3 4 5 6 7 8 def margin_loss (self, x, labels, size_average=True ): batch_size = x.size(0 ) v_c = torch.sqrt((x**2 ).sum (dim=2 , keepdim=True )) left = F.relu(0.9 - v_c).view(batch_size, -1 ) right = F.relu(v_c - 0.1 ).view(batch_size, -1 ) loss = labels * left + 0.5 * (1.0 - labels) * right loss = loss.sum (dim=1 ).mean() return loss
该函数为代价函数,分别实现了两种情况下($T_c = 0,T_c = 1$)的代价函数。
参考资料 代码来自higgsfield’s github
文字资料参考weakish 翻译的Max Pechyonkin 的博客:
此外还参考: